Ijeneretha Yokugoqa Esebenzisa Iminwe Emibili Ethambile Yomoya Esebenzisana Nayo Yokwenza Amarobhothi Asebenze Ngokuzenzakalelayo



Ijeneretha Yokugoqa Esebenzisa Iminwe Emibili Ethambile Yomoya Esebenzisana Nayo Yokwenza Amarobhothi Asebenze Ngokuzenzakalelayo
Isigaba Esiyinhloko
Ingalo yerobhothi yezimboni / Ingalo yerobhothi ebambisene / I-gripper kagesi / I-actuator ehlakaniphile / Izixazululo ze-automation
Isicelo

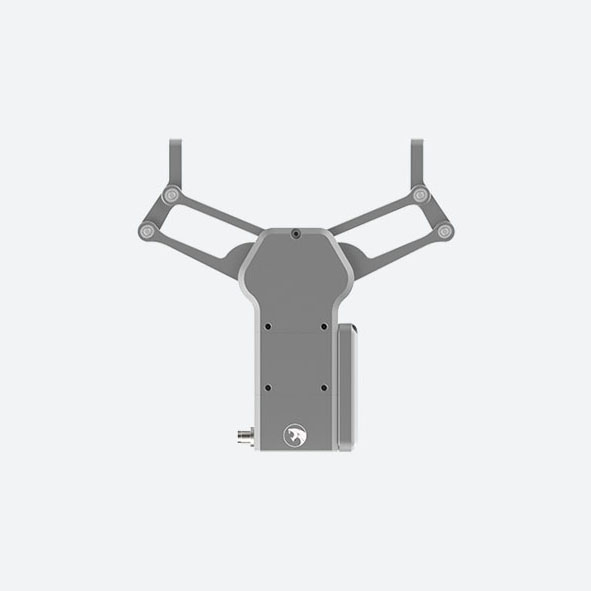
Ama-gripper erobhothi ochungechunge lwe-SCIC Z-EFG mancane ngobukhulu anesistimu ye-servo eyakhelwe ngaphakathi, okwenza kube nokwenzeka ukufeza ukulawula okunembile kwesivinini, isikhundla, kanye namandla okubopha. Uhlelo lokubamba olusezingeni eliphezulu lwe-SCIC lwezixazululo zokwenza izinto ngokuzenzakalelayo luzokuvumela ukuthi uvule amathuba amasha okwenza imisebenzi ngokuzenzakalelayo ongakaze ucabange ukuthi ingenzeka.
Isici
·Ukushaya okukhulu
· Amandla okubopha alungisekayo kanye nokushaya okulungisekayo
·Impilo ende: amashumi ezigidi zemijikelezo, idlula izinzipho zomoya
· Isilawuli esakhelwe ngaphakathi: usayizi omncane, ukuhlanganiswa okulula
·Ukulawula ibhasi le-EIA485, I/O
Amandla Okubopha: 40-130N, Uhlobo lwe-Y lweGripper kagesi olunomugqa ongu-120mm
I-Stroke Ende
Ububanzi obuphelele: 120mm
Imodi Yokulawula
485 Modbus, EIA485, Ukulawulwa Kwebhasi
Amandla Okubopha
Amandla Okubopha 40-130N Alungisekayo
Isilawuli Ngaphakathi
Indawo encane yokuxhumana, kulula ukuyihlanganisa
Ukulawula Ukunemba
Ukuphindaphinda: ± 0.02mm
Ukubopha Okuthambile
Ingabamba izinto ezibuthakathaka nezigugile

● Ukukhuthaza inguquko ekufakweni kwezingcibi zomoya esikhundleni sezingcibi zogesi, ingcibi yokuqala kagesi enesistimu ye-servo ehlanganisiwe eShayina.
● Ukushintshwa okuphelele kwe-air compressor + isihlungi + i-solenoid valve + i-throttle valve + i-pneumatic gripper
● Impilo yesevisi yemijikelezo eminingi, ehambisana nesilinda yendabuko yaseJapan
Imikhiqizo Ehlobene



Ipharamitha Yokucaciswa
| Inombolo Yemodeli Z-EFG-130 | Amapharamitha |
| Isiyonke isifo sohlangothi | 120mm |
| Amandla okubamba | 40-130N |
| Ukuphindaphinda | ± 0.02mm |
| Isisindo sokubamba esinconyiwe | Ubuningi obungu-1kg |
| Ukudluliswa imodi | Isikulufa se-nut + ukuxhumanisa |
| Ukugcwalisa kabusha amafutha ezingxenyeni ezihambayo | Njalo ezinyangeni eziyisithupha noma ukunyakaza/isikhathi esiyisigidi esisodwa |
| Isikhathi sokunyakaza kwe-stroke yendlela eyodwa | 0.9s |
| Ibanga lokushisa lokusebenza | 5-55℃ |
| Ububanzi bomswakama obusebenzayo | I-RH35-80(I-1965)Akukho qhwa) |
| Imodi yokunyakaza | Ukuxhumanisa |
| Ukulawula isifo sohlangothi | Okulungisekayo |
| Ukulungiswa kwamandla okubopha | Okulungisekayo |
| Isisindo | 0.8kg |
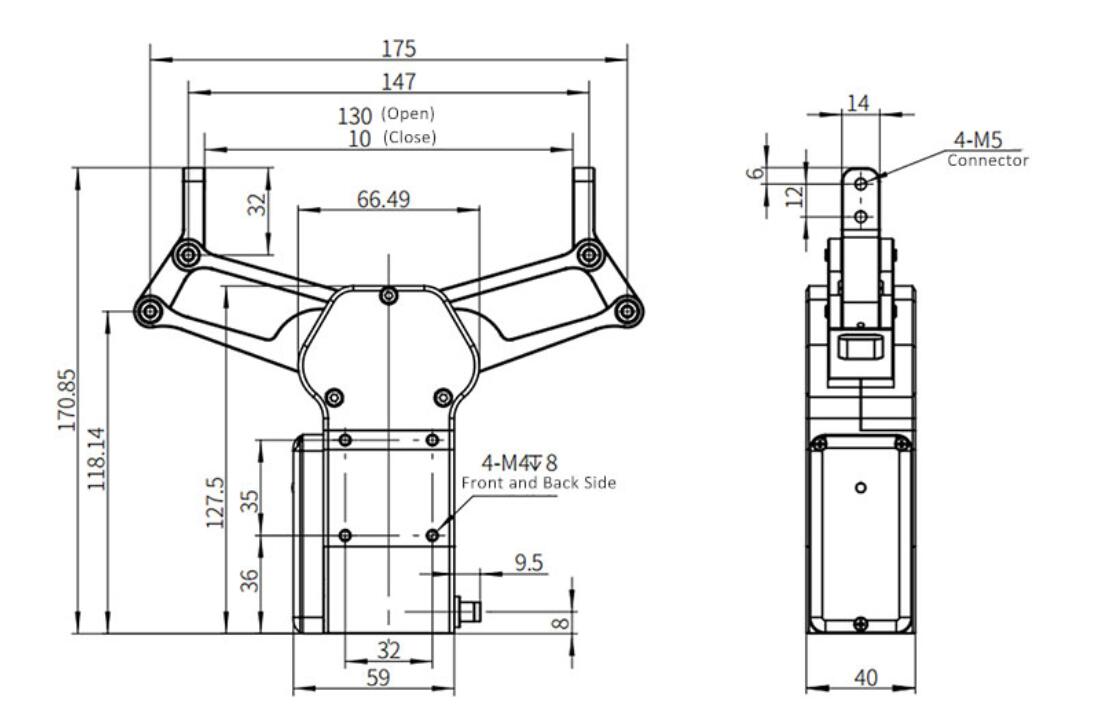
| Ubukhulu(I-1965)L*W*H) | 171*187*40mm(ivuliwe)218*66.5*40m(ivaliwe) |
| Ukubekwa kwesilawuli | Kwakhelwe ngaphakathi |
| Amandla | 10W |
| Uhlobo lwenjini | I-DC engenamabhulashi |
| Umkhawulo Wamanje Ophakeme | 2A |
| I-voltage elinganisiwe | 24V |
| Ugesi olindile | 0.4A |
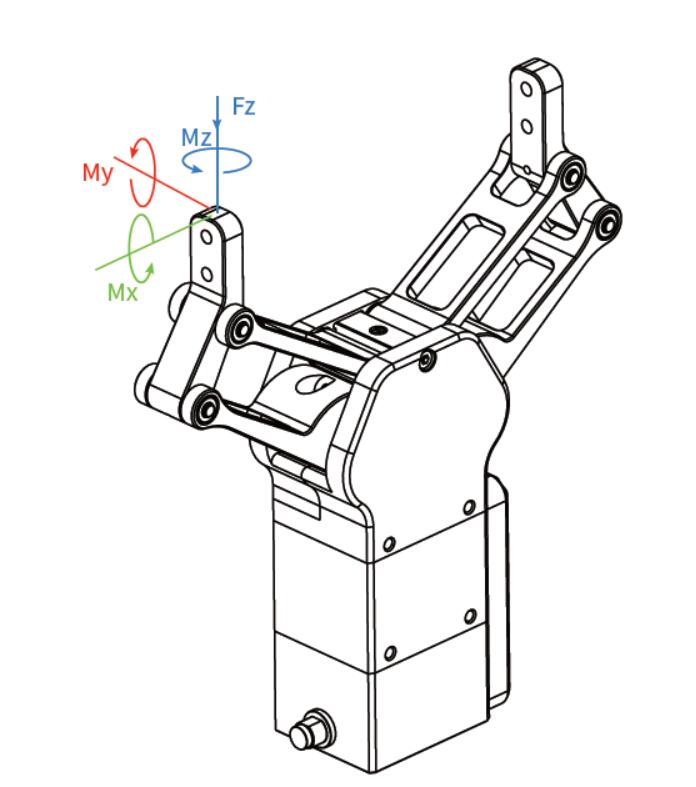
| Umthwalo oqinile ovumelekile ohlangothini oluqondile | |
| Fz: | 200N |
| I-torque evumelekile | |
| I-Mx: | 2 Nm |
| Okwami: | 2 Nm |
| Mz: | 2 Nm |
Xhuma bese udlala, Kulula Ukuhlanganisa
I-gripper kagesi ye-Z-EFG-130 ingahambisana nengalo yerobhothi esebenzisana nayo, futhi inesistimu ye-servo ehlanganisiwe ngaphakathi, i-gripper eyodwa kuphela engalingana ne-compressor + filter + solenoid Valve + Throttle Valve + air gripper.


I-Long Stroke, Ukuhambisana Okuhle
Ukuqina okusebenzayo kwegripper kagesi kungafinyelela ku-120mm, usayizi wayo wokuvala ungu-10mm, igripper kagesi ingasetshenziswa kuma-chip e-semiconductor, i-3C electronic kanye neminye imboni yokunemba, njll.
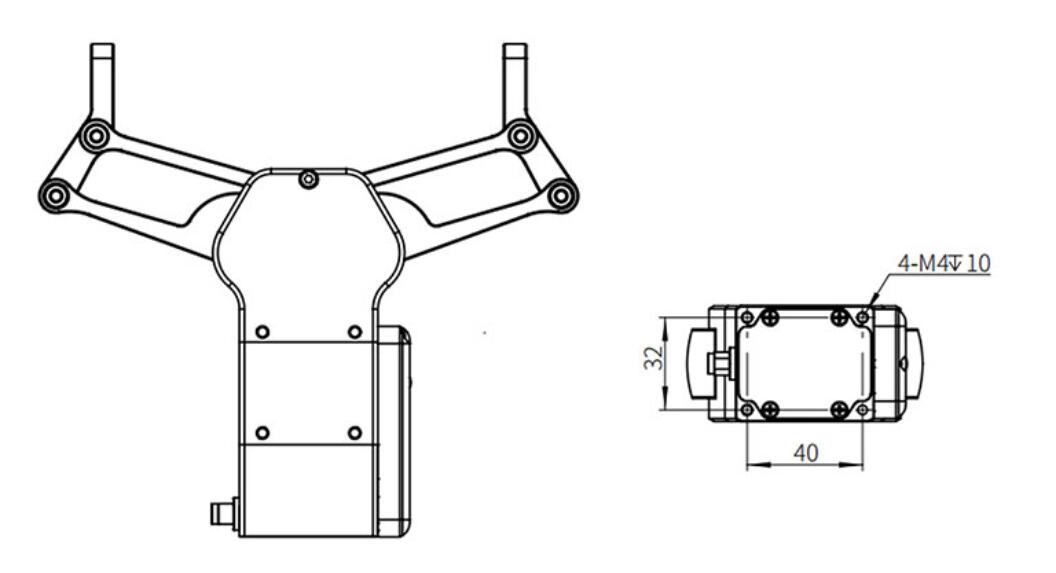
Usayizi Omncane, Kulula Ukuhlanganisa

Usayizi wokuvula we-Z-EFG-130 ungu-171*187*40mm, usayizi wokuvala ungu-218*66.5*40mm, uyisakhiwo esincane, isekela izinhlobo zokufaka eziningi, iyisilawuli ngaphakathi, indawo encane imboziwe.

Ukulawula Amandla Okunembile
I-gripper kagesi ihloselwe ukusebenzisa umklamo okhethekile wokudlulisa kanye nesinxephezelo se-algorithm yokushayela, amandla okubopha angama-40-130N angaguquguquka, isisindo sokubopha esiphakanyisiwe ≤1kg, futhi ingafinyelela ukuphindaphindeka okungu-± 0.02mm.
Ukubamba Okuguquguqukayo, Umsila Ongashintshashintshayo

Isibambi sikagesi se-Z-EFG-130 sisekela ukubamba okuguqukayo, sifaneleka kakhulu entweni eyindilinga, eyindilinga noma enomumo okhethekile, izingxenye zomsila wayo zingashintshwa kalula, amakhasimende angazibamba izinto ngokwezidingo zawo.


Izindlela Zokulawula Eziphindaphindayo, Kulula Ukuzisebenzisa

I-gripper kagesi ingalawulwa ngokunemba yi-Modbus, ukucushwa kwayo kulula, ukusebenzisa inqubo yokuxhumana ye-Digital I/O, udinga nje ikhebula elilodwa ukuze uxhumeke nge-ON/OFF, iyahambisana nohlelo lokulawula oluyinhloko lwe-PLC.
Isikhungo Sokulayisha se-Gravity Offset
Ibhizinisi Lethu


Izigaba zemikhiqizo
-

Intengo Yokuncintisana Yerobhothi Lezimboni 6 Axis Manip ...
-

Ukukhetha Izithelo Zamaqanda Ezisheshayo Zemboni Nokubeka Indawo 4 ...
-

I-Dobot Six Axis Collaborative Robot Arm Articula...
-

I-Long Robotic Arm Army Telescopic Manipulator 20...
-
I-Hot Sale Robot Arm Metal 6-Axis Mechanical Robo ...
-

I-Industrial Machine Robot Arm 4 Axis Manipulator...