UCHUNGECHUNGE LWE-HITBOT ELECTRIC GRIPPER – I-Z-EFG-C50 I-Electric Gripper Esebenzisana Nayo




Isigaba Esiyinhloko
Ingalo yerobhothi yezimboni / Ingalo yerobhothi ebambisene / I-gripper kagesi / I-actuator ehlakaniphile / Izixazululo ze-automation
Isicelo
Ama-gripper erobhothi ochungechunge lwe-SCIC Z-EFG mancane ngobukhulu anesistimu ye-servo eyakhelwe ngaphakathi, okwenza kube nokwenzeka ukufeza ukulawula okunembile kwesivinini, isikhundla, kanye namandla okubopha. Uhlelo lokubamba olusezingeni eliphezulu lwe-SCIC lwezixazululo zokwenza izinto ngokuzenzakalelayo luzokuvumela ukuthi uvule amathuba amasha okwenza imisebenzi ngokuzenzakalelayo ongakaze ucabange ukuthi ingenzeka.

Isici

·Ukutholwa kokuwa kwegripper, umsebenzi wokukhipha indawo
· Amandla, isikhundla kanye nesivinini kungalawulwa ngokunembile ngeModbus
·Impilo ende: amashumi ezigidi zemijikelezo, idlula izinzipho zomoya
· Isilawuli esakhelwe ngaphakathi: indawo encane, ukuhlanganiswa okulula
·Imodi yokulawula: 485 (Modbus RTU), I/O
I-Stroke engu-50mm, i-Clamping Force engu-140N, Iyahambisana ne-Robot Arm engu-6-axis.
Imvamisa Ephezulu
Isikhathi esifushane kakhulu sokushaya singamasekhondi angu-0.5
Ukunemba Okuphezulu
Ukuphindaphinda kungu-± 0.03mm
Umthwalo Ophezulu
Isisindo sokubopha esinconyiwe ≤2kg
Xhuma bese udlala
I-gripper kagesi ngokukhethekile yengalo yerobhothi ene-axis engu-6
Umsila Ongashintsha
Umsila wayo uyashintshashintsha, ufanelekela izicelo ezahlukahlukene
Amandla Okubamba Okuthambile
Ingabamba izinto ezibuthakathaka nezikhubazekile

● Ukukhuthaza inguquko ekufakweni kwezingcibi zomoya esikhundleni sezingcibi zogesi, ingcibi yokuqala kagesi enesistimu ye-servo ehlanganisiwe eShayina.
● Ukushintshwa okuphelele kwe-air compressor + isihlungi + i-solenoid valve + i-throttle valve + i-pneumatic gripper
● Impilo yesevisi yemijikelezo eminingi, ehambisana nesilinda yendabuko yaseJapan
Imikhiqizo Ehlobene



Ipharamitha Yokucaciswa
| Inombolo Yemodeli Z-EFG-C50 | Amapharamitha |
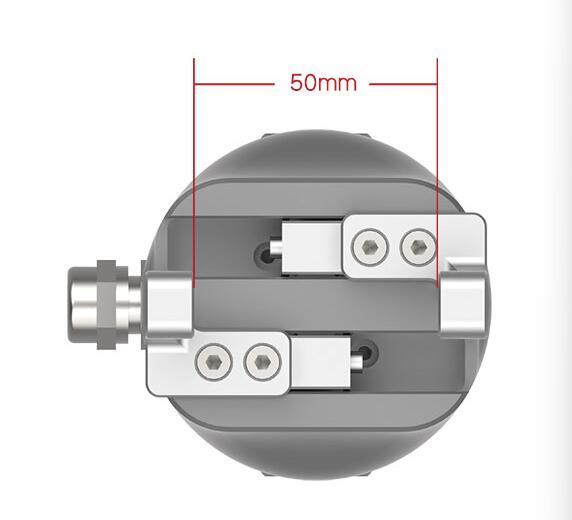
| I-stroke ephelele | I-50mm elungisekayo |
| Amandla okubamba | I-40-140N elungisekayo |
| Ukuphindaphinda | ± 0.03mm |
| Isisindo sokubamba esinconyiwe | ≤2kg |
| Imodi yokudlulisa | Irekhi yegiya + Umhlahlandlela ojikelezayo |
| Ukugcwalisa kabusha amafutha ezingxenyeni ezihambayo | Njalo ezinyangeni eziyisithupha noma ukunyakaza/isikhathi esiyisigidi esisodwa |
| Isikhathi sokunyakaza kwe-stroke yendlela eyodwa | 0.5s |
| Imodi yokunyakaza | Iminwe emibili ihamba ngokuvundlile |
| Isisindo | 1kg |
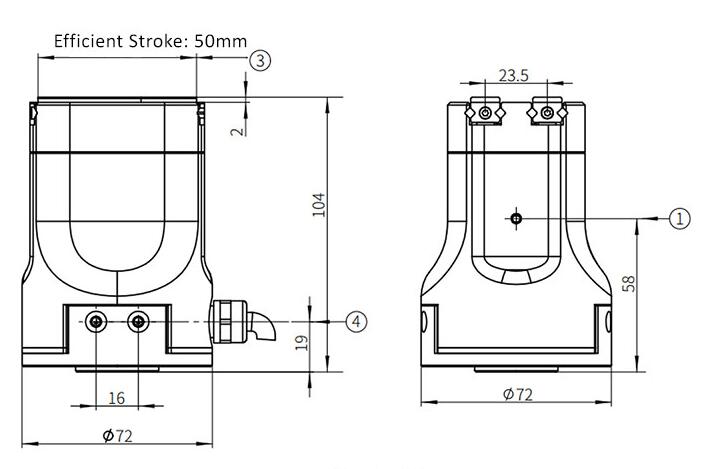
| Ubukhulu (L*W*H) | 72*72*143mm |
| I-voltage yokusebenza | 24V±10% |
| Isilinganiso samanje | 0.8A |
| Ugesi ophakeme | 2A |
| Amandla | 20W |
| Isigaba sokuvikela | I-IP20 |
| Uhlobo lwenjini | I-DC engenamabhulashi |
| Ibanga lokushisa lokusebenza | 5-55℃ |
| Ububanzi bomswakama obusebenzayo | RH35-80 (Akukho frost) |

| Umthwalo oqinile ovumelekile ohlangothini oluqondile | |
| Fz: | 300N |
| I-torque evumelekile | |
| I-Mx: | 7 Nm |
| Okwami: | 7 Nm |
| Mz: | 7 Nm |
Ukushayela Okuhlanganisiwe Nokulawula
I-gripper kagesi ye-Z-EFG-C50 inesistimu ye-servo ehlanganisiwe ngaphakathi, i-stroke yayo iyonke ingu-50mm, amandla okubopha angu-40-140N, amandla ayo okushaya kanye nokubopha ayalungiseka, futhi ukuphindaphindwa kwayo kungu-±0.03mm.

Iyahambisana ne-Six-Axis Robot Arm

I-gripper kagesi ingahambisana nengalo yerobhothi engu-6-axis, ukuze ikwazi ukuxhuma nokudlala, isikhathi sayo esifushane kakhulu sokushaya singamasekhondi angu-0.5 kuphela, okungahlangabezana nezicelo zokubopha zomugqa wokukhiqiza ozinzile.
Usayizi Omncane, Oguquguqukayo Ukufaka

I-Z-EFG-C50 iwukusebenzisa imodi yokudlulisela ye-gear rack + ibhola le-guide rail, usayizi womkhiqizo ungu-L72*W72*H143mm, ingaguquguquka ukuze ihlelwe esimweni sendawo encane.


Ukusabela Okusheshayo, Ukunemba Kokulawula Amandla

Isikhathi esifushane kakhulu sokushaywa okukodwa singamasekhondi angu-0.5 kuphela, singabhekana nomsebenzi wokubopha okusheshayo, izingxenye zomsila waso zingashintshwa nganoma yisiphi isikhathi, amakhasimende angalungisa imisila ngokwesidingo.
Izindlela Zokulawula Eziphindaphindayo, Kulula Ukuzisebenzisa

Ukucushwa kwe-Z-EFG-C50 kulula, inezindlela zokulawula eziningi, kufaka phakathi i-485 (Modbus RTU), i-Pulse, i-I/O, futhi iyahambisana nesistimu yokulawula eyinhloko ye-PLC.

Isikhungo Sokulayisha se-Gravity Offset
1. Isikhombisi se-LED
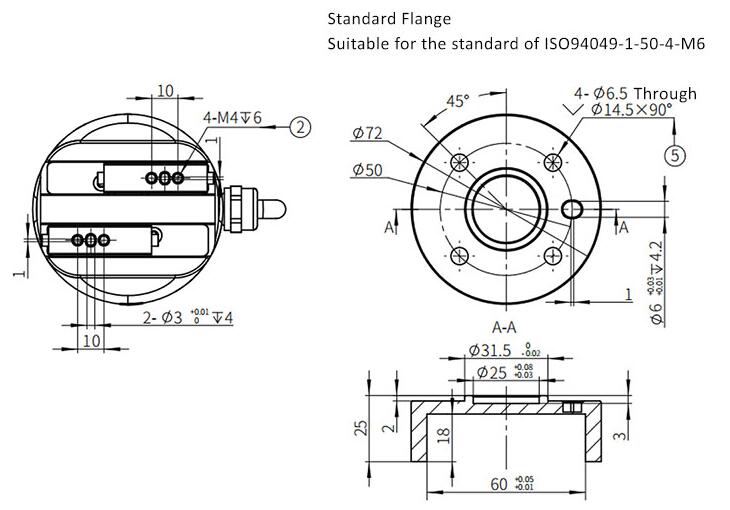
2. Indawo Yokufaka, sebenzisa Izikulufo ze-M4 ezingama-4pcs
3. Ukuqina kwegripha kagesi kungu-50mm
4. Indawo Yokuthengisa Amantongomane
5. Indawo yokufaka, sebenzisa izikulufo ze-M6 ezingama-4pcs ukuze uxhume ne-flange yokugcina yengalo yerobhothi esebenzisana
Ibhizinisi Lethu


Izigaba zemikhiqizo
-

UCHUNGECHUNGE LWE-DH ROBOTICS SERVO ELECTRIC GRIPPER RGI –...
-

UCHUNGECHUNGE LWE-DH ROBOTICS SERVO ELECTRIC GRIPPER CG – ...
-

UCHUNGECHUNGE LWE-DH ROBOTICS SERVO ELECTRIC GRIPPER RGI –...
-

UCHUNGECHUNGE LWE-DH ROBOTICS SERVO ELECTRIC GRIPPER PGC –...
-

UCHUNGECHUNGE LWE-DH ROBOTICS SERVO ELECTRIC GRIPPER PGE –...
-

I-HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-12 Paral...